 خانه بیگ دیتا تحلیل شبکه های اجتماعی، متن کاوی، داده کاوی، اوسینت و داده های حجیم
خانه بیگ دیتا تحلیل شبکه های اجتماعی، متن کاوی، داده کاوی، اوسینت و داده های حجیم
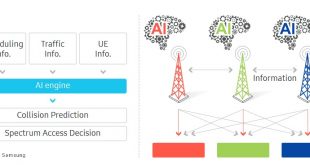
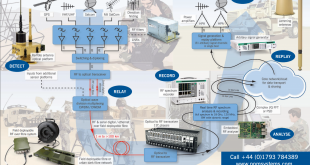
ارتباط بین ریزپرنده ها یا پهبادهای کوچک در حین عملیات
تهیه کننده: محمد فراهاني
مقدمه از پیشرفت هاي سریع در فن آوري هاي الکترونیکی،سنسور و ارتباطات،می توان این نتیجه را گرفت که این امکان وجود دارد که سیستم هاي هواپیمایی بدون سرنشین(UAV)به صورت خودمختار می توانند پرواز کنند یا می تواند از راه دور آنها را اداره کرد.زیرا از قابلیت هاي همه جانبه،انعطاف پذیري،نصب آسان و هزینه هاي عملیاتی نسبتا کم، استفاده از UAV ها وعده داده می شود راه هاي جدید براي برنامه هاي نظامی وغیر نظامی، مانند جستجو و نابودي عملیات نظارت مرزي،مدیریت آتش سوزي،رله براي شبکه هاي ad hoc ، برآورد باد،نظارت بر فاجعه،سنجش از راه دور و نظارت بر ترافیک.در این تحقیق،به شبکه هاي ad_hoc پروازی (FANET)، اشاره شده است.
عناوين مطالب: '
- ارتباط شبکه ای بین ریزپرنده ها
- 2-سناریوهاي کاربردي FANET
- 2-2- قابلیت اطمینان در ارتباطات چند پهبادي (UAV)
- 3-2- روش هاي اشتراک گذاری معيارهای مسیریابی
- 4-1-3-چگالی گره ها در ارتباط بین ریزپرنده ها
- 4-1-7 – مقیاس پذيري
- 5- پروتکل هاي ارتباطی براي FANETs
- 5-2-2-لایهMAC در شبکه ادهاك با رادیوي کاملا دو طرفه وپذیرنده چند بسته اي
ارتباط شبکه ای بین ریزپرنده ها
شبکه هاي ادهاك ساده ترین نوع شبکه هاي بیسیم است چرا که پیاده سازي آنها نیازمند زیرساخت و ابزار و همینطور تکنولوژي خاصی نمی باشد و به سادگی در هر زمان و مکان که نیاز باشد شبکه اي داشته باشیم قابل پیاده سازي هستند.ازجنبه دیگر استفاده از این شبکه ها بسیار با صرفه تر می باشد چرا که در آنها به هیچ نقطه دسترسی وتجهیزات مسیریابی نیاز نیست (هر یک از گره ها می تواند نقش یک نود و یا یک مسیریاب داشته باشد). هزینه: هزینه هاي خرید و نگهداري از UAV هاي کوچک بسیار پایین تراز هزینه یک پهپاد بزرگ است. مقیاس پذیري: استفاده از هواپیماي بدون سرنشین بزرگ تنها محدود است مقدار پوشش افزایش می یابد. با این حال، سیستم هاي چند پهبادي می توانند به راحتی مقیاس پذیري عملیات را گسترش دهند. سرعت بالا: ماموریت ها می توانندسریعتربا تعداد بیشتري از پهپادها تکمیل شوند . مقطع رادار کوچک: به جاي یک مقطع رادار بزرگ،سیستم هاي چند UAV، مقادیر زیادي رادار را ایجاد می کنند که براي برنامه هاي نظامی بسیار مهم است. اگرچه چندین مزیت برای سیستم هاي چند منظوره ي پهپاد وجود دارد،اما در مقایسه با سیستم هاي تک نفره، چالش هاي منحصر به فرد مانند ارتباطات نیز وجود دارد.در یک سیستم UAV تنها یک پایگاه زمینی یا یک ماهواره براي ارتباطات استفاده می شود.همچنین ممکن ارتباط بین هوابرد وپهباد یک سیستم کنترل برقرار شود.در همه موارد،ارتباطات واحد UAV بین نیروي هوایی وزیرساخت ها برقرار است.درحالی که تعداد هواپیماهاي بدون سرنشین در سیستم هاي هوایی بدون سرنشین افزایش می یابد،طراحی معماري هاي شبکه کارآمد به عنوان یک مسئله حیاتی براي حل این مسئله ظاهر می شود.
2-سناریوهاي کاربردي FANET
در این بخش، سناریوهاي مختلف FANET مورد بحث قرار می گیرند.
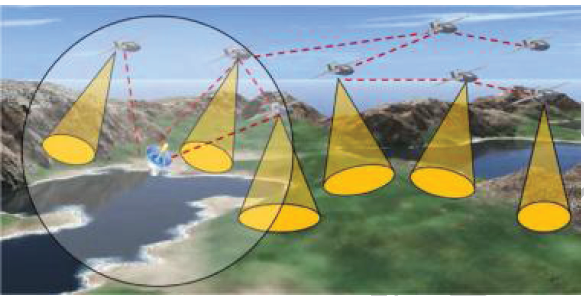
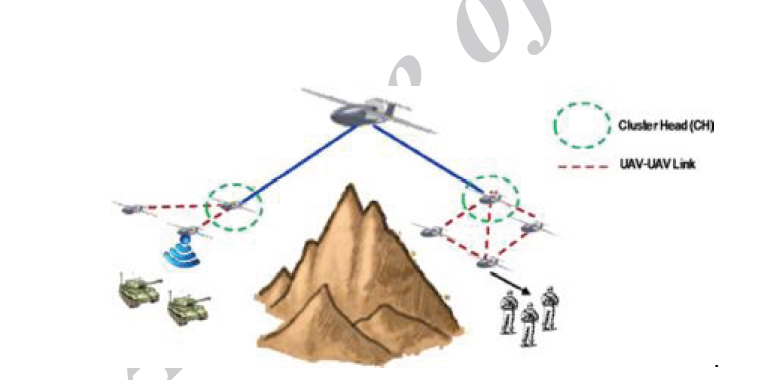
2-1-گسترش مقیاس پذیري عملیات multi-UAV اگر یک شبکه ارتباطی چند پهبادي(UAV) به طور کامل بر اساس یک زیرساخت، مانند یک ماهواره یا مرکز زمین، نصب شود،منطقه عملیاتی محدود به پوشش ارتباطی زیرساخت است.اگر یک پهباد(UAV) با زیرساخت بتواند ارتباط برقرار کند،کار نمی تواند انجام دهد. از سوي دیگر، FANET براساس پیوندهاي داده ي UAV-to-UAV است می توان پیوند داده ها به پهپاد هاي زیرساخت هارا گسترش داد.حتی اگر یک گرهFANET باشد نمی تواند یک ارتباط با زیرساخت داشته باشد، هنوز هم میتواند با برقراري ارتباط از طریق پهپادهاي دیگر ارتباط برقرار کند. این سناریو در شکل 1 نشان داده شده است.
شکل1 : یک سناریوي براي گسترش مقیاس پذیري سیستم هاي چند پهبادي در FANET
2-2- قابلیت اطمینان در ارتباطات چند پهبادي (UAV)
شبکه هاي FANET می توان شکل جدیدي از شبکه هايMANET تعریف کرد که در آن گره ها،پهبادها هستند.با توجه به این تعریف،یک سیستم تک پهباده شکلی از یکFANET نیست،بلکه براي سیستم چند پهباده معتبر است.
از سوي دیگر همه سیستم هاي چند پهباده شکلی از FANET نیستند. ارتباط پهباد ها باید متکی به شبکه هاي خود مختار بین پهباد ها باشد.بنابراین،اگرارتباط بین پهبادها کاملا متکی به پیوند هاي ارتباطی پهباد به زیرساخت باشد، نمی توان آن را به عنوان یک FANET طبقه بندي کرد.
2-3- گروهی از پهبادها UAV پهپادها کوچک بسیار سبک و داراي ظرفیت کم هستند. به رغم قابلیت هاي محدود خود،هواپیماهاي کوچک چندگانه می توانند با حرکت دسته اي خود ماموریت هاي پیچیده را انجام دهند.حرکت دسته اي UAVs نیازمند کارهاي هماهنگ است وپهبادها باید براي هماهنگی با یکدیگر ارتباط برقرارکنند. با این حال، به دلیل کمبود بارهاي کوچک هواپیماهاي بدون سرنشین،ممکن است حملات سخت افزاري ارتباطات وسیع حمل ونقل هوایی به زیرساخت را نداشته باشدFANET، که به سخت افزار نسبتا سبک تر و ارزان تر نیاز دارد،می تواند براي ایجاد یک شبکه بین پهپادها کوچک استفاده شود. با کمک معماري FANET،هواپیماهاي بدون سرنشین میتوانند از برخورد خود جلوگیري کنند و هماهنگی بین پهبادها میتواند باعث موفقیت در مأموریت شود.
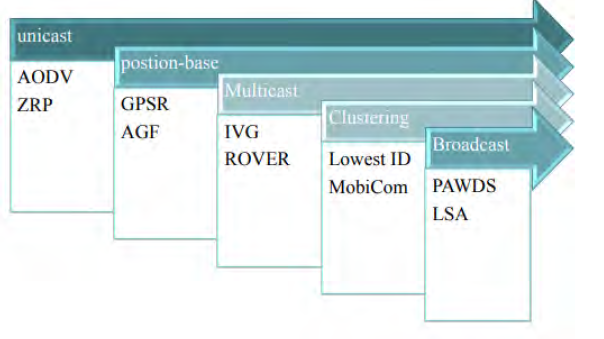
3-پروتکل های مسیر یابی پروتکل های مسیریابی به صورت یک روش برای ارسال داده ها در میان دو گره که در محدوده انتقال یکدیگر نمی باشند تعریف خواهد شد. این امر شامل تعریف قوانینی برای ایجاد مسیر، استراتژی ارسال بسته های داده، اقدام برای حفظ مسیر و بازیابی مسیرهای از بین رفته خواهد بود. پروتکل های مسیریابی به عنوان یک بخش مهم در ارتباطات شبکه های در نظر گرفته خواهند شد. پروتکل های مسیریابی در شبکه پرواز موقت عموما فرض خواهندکرد که موقعیت پهباد ها با استفاده از تکنولوژی های دسترسی به ماهواره و سیستم های به دست آوردن موقعیت مانند GPS قابل دستیابی می باشد. شکل (2) انواع پروتکل ها مسیریابی را نشان میدهد.
3-1- معیار های مسیر یابی بر اساس نوع توپولوژي و نیز سناریوی در نظر گرفته شده معيارهای متفاوتی را برای پيدا کردن مسیر مناسب در شبکه هاي سيار مورد استفاده قرار داده اند.پروتکل هاي بسیاری در جهت انتخاب گره رله کننده بسته هاي داده با استفاده از معيار هاي يگانه و يا ترکيب برخی از آنها و يا سراسری دسته بندي شوند ارايه شده اند.اين معيار ها ميتوانند به صورت محلی ، متقاطع معيارهای محلی گام بعدی گره ها را بر اساس مقدار های محلی همسایگان تعيين کنند. از سوی دیگر معيار سراسری ، مقادير سراسری،مقادیر معيارها را بر اساس کل مسیر محاسبه ميکنند.معيار مسیریابی متقاطع پارامترهای مسیریابی را ازلایه های متفاوت در نظر میگیردو به لایه شبکه تحویل مي دهد.
3-2- روش هاي اشتراک گذاری معيارهای مسیریابی
در حین به اشتراک گذاری داده ها این سوال مطرح خواهد شد که معيارهای مسیریابی چگونه انتشار مي یابند؟ در حالت کلي با استفاده از سه روش زیر اطلاعات انتشار مي یابند:
– اشتراک گذاری دوره های اطلاعات :
در این روش، اطلاعات توپولوژي بدون توجه به استفاده ار آنها به صورت دوره هایي به اشتراک گذاشته مي شوند. این روش برای مسیرهایی که جدول مسیریابی خود را با کلاک به روزرسانی ميکنند مفید مي باشد، با این حال دارای هزینه سربار بالایی می باشند.
-اشتراک گذاری معیارهای مسیریابی مبتنی بر رويداد:
این طرح فقط بر اساس نياز ، اطلاعات را اشتراک گذاری ميکند.جدول مسیر یابی تا هنگامي که پیوند ها شکسته نشوندبدون توجه به کاهش کارایی و یا تغيير توپولوژي شبکه حفظ مي شوند.این کار براي شبکه هایی با سر بار پايين مفيد مي باشد.با این حال دارای هزینه افزون تر از نظر تاخير برای پیدا کردن مسیر در زمان مورد نیاز مي باشند.
-ترکیبی از روش 1و 2 4- ویژگی هاي طراحیFANET قبل از بحث درباره ویژگی هاي FANET،یک تعریف رسمی ازFANET ویک بحث مختصر در موردآن براي روشن شدن FANETما ارائه می دهیم.در این تحقیق شبکه هاي ادهاك پروازي FANET به طور مستقل، زیر مجموعه اي از شبکه ادهاك یاMANET در نظر گرفته شده است.از آنجا که گره ها در شبکه هاي FANET متحرك هستند و انرژي آنها از باتري تامین می شود، می بایست روش هایی مناسبی را به منظور صرفه جویی در مقدار انرژي مصرفی بکار برد .مسیریابی گره ها یکی از مهمترین عوامل موثر در مقدار انرژي مصرفی می باشد، زیرا این نوع شبکه از خود گره ها جهت مسیریابی استفاده میکند.در مقالات و پژوهش هایی که در این حوضه کار شده است، الگوریتم ها و پروتکل هاي مختلفی مسیریابی در شبکه هاي FANET ایجاد و تجزیه و تحلیل شده اند که هر کدام از آنها درجایگاه خود براي نوع خاصی از این شبکه با توپولوژي شبکه خاصی مناسب می باشد. یکی دیگر ازموضوعاتFANET مربوط به شبکه حسگرهوایی است شبکه سنسور هوایی یک سنسور وحامی بسیار تخصصی تلفن همراه است تا گره هاUAV ها باشند. آن را در اطراف محیط حرکت می کند، با سنسورهاي UAV ها حس میکند و اطلاعات جمع آوري شده را به پایگاه زمین می فرستد .علاوه بر این، میتواند با حامیان خود در هواپیماهاي بدون سرنشین عمل کند تا مأموریت خود را انجام دهد .این یک مسئله که مشکل را به عنوان یک شبکه اختصاصی هواپیما یا شبکه سنسورهوایی نامگذاري کند.چالش هاي اصلی طراحی یک شبکه حسگر سنتی عبارتند از مصرف انرژي وتراکم گره، وهیچ یک از آنها با سیستم هاي چند پهبادي مرتبط نیست.به طورکلی، UAV ها انرژي کافی براي پشتیبانی ازسخت افزار ارتباطی خود دارندوتراکم گره یک سیستم چندین واحدUAV در مقایسه با شبکه هاي حسگر سنتی بسیار پایین است. سیستم ارتباطی چند منظوره ي پهپاد را براساس پیوندهايUAV-to-UAVبه عنوان یک شبکه اختصاصی مجاز به جاي یک سنسور مخصوص شبکه است.یک شبکه اختصاصی ویژه يUAVموضوع دیگري است که نزدیک به FANET است.
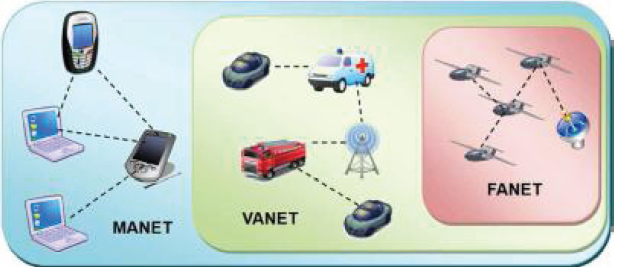
4-1- تفاوت بین FANET وشبکه هاي موجود تک سرنشین شبکه هايad hoc بی سیم به ترتیب اهدافی شامل طبقه بندي بهره برداري، گسترش، ارتباطات و مأموریت می شوند.باتعریف،FANET یک شکل از MANETاست وبسیاري از ملاحظات طراحی مشترك برايMANET وجود دارد و FANET علاوه بر این،FANET نیز میتواند طبقه بندي شود به عنوان یک زیر مجموعه ازVANET، همچنین یک زیر گروه MANET است.این رابطه در شکل 2 نشان داده شده است.
به عنوان یک تحقیق در حال ظهورمنطقهFANET ویژگی هاي مشترك بااین شبکه ها،وهمچنین داراي چندین چالش طراحی منحصر به فرد است.دراین بخش،تفاوت بینFANETو شبکه هاي خودمختاربی سیم موجود به شیوه اي دقیق توضیح داده شده است. 4-1-1- حرکت گرهمسائل مربوط به تحرك گره ها تفاوت قابل توجهی بین شبکه هاي FANET ودیگر شبکه هاي ad hoc است. حرکت گره هايMANET در مقایسه باگره هايVANET نسبتا کندتراست.درFANET درجه حرکت گره ها خیلی بیشتر از VANET و MANET است.یکUAVداراي سرعت 460-30 کیلومتر در ساعت است و این وضعیت نتایج و مشکلات چندین طرح ارتباطات چالش برانگیز را دنبال می کند.
4-1-2-مدل متحرکدر حالی که گره هاي MANET دریک زمینه مشخص حرکت می کنند،گره ها VANET درزمینه هاي بیشتري حرکت میکنند وگره هايFANET که پرواز در آسمان است.مدل متحرك MANETs به طور کلی مسیریابی تصادفی را اجرا می کنند. گره هايVANET منحصر به حرکت دربزرگراهها یا جاده ها هستند. بنابراین، مدل متحرك VANET بسیار قابل پیش بینی است.
در برخی برنامه هاي کاربردي چند پهبادي برنامه هاي مسیر جهانی وجود دارد.دراین حالت، پهبادهادر یک مسیراز پیش تعیین شده حرکت می کند،ومدل متحرك منظم است.درسیستم هاي خودمختار چندپهبادي، برنامه پرواز از پیش تعیین نشده است. حتی اگر یک سیستم چند منظوره از برنامه هاي پرواز از پیش تعیین شده استفاده کند،به دلیل تغییرات محیطی یا به روزرسانی ماموریت طرح پرواز ممکن است دوباره محاسبه شود.علاوه بر پرواز تغییرات برنامه ریزي شده، حرکات سریع و شدید UAV و تشکل هاي مختلف پهپاد به طور مستقیم بر مدل متحرك تاثیر می گذارد سیستم هاي چند پهبادي به منظور حل این مسئله،مدل متحركFANET پیشنهادشده است. بر اساس یک فرآیند مارکوف از پیش تعیین شده،هر نوع پهپادي تصمیم می گیرد که مسیر حرکتش را تعیین کند.در مدل ديگري،هواپیماهاي بدون سرنشین نقشه را با یک ماده خاصی به نام فرومون حفظ میکنند، که فضانوردان حرکت خود را هدایت کنند.
هر هواپیماي بدون سرنشین آن را نشان می دهد مناطقی را بر روي این نقشه اسکن میکند وآنها به اشتراك میگذارد نقشه با پخش فراگیر براي به حداکثررساندن پوشش،هواپیماهاي بدون سرنشین ترجیح می دهند که حرکت را از طریق مناطقی که با کمترین فرومون نشان داده شده است انجام دهندکه استفاده از یک نمونه معمولی مدل متحرك MANE ممکن است به مسیر نامطلوب منجر شود. بنابراین می توان دید که این مدل تصادفی به صورت قابل ملاحظه اي ساده است، امامنجر به نتایج خوبی می شود.
.FANET MANET, VANET :2
4-1-3-چگالی گره ها در ارتباط بین ریزپرنده ها
چگالی گره میتواند به عنوان میانگین تعداد گره ها در یک منطقه تعریف شود.گره هايFANET معمولادر آسمان پراکنده هستند،و فاصله بین UAV ها می تواند حتی براي سیستم هاي کوچک چند پهبادي چندین کیلومتر باشد.چگالی گره هاFANET در پهبادها بسیار پایین تر از MANET و VANETاست. 4-1-4- مدل پخش رادیو تفاوت بینFANET وسایر محیطها ازعواملی است که برروي پخش رادیویی تاثیر میگذارد.گره هاي MANETوVANET به طور قابل ملاحظه اي نزدیک به زمین هستند ودر بسیاري از موارد بین فرستنده و گیرنده ارتباط مستقیم وجود ندارد.بنابراین، سیگنال هاي رادیویی عمدتا تحت تاثیر ساختار جغرافیایی زمین قرار می گیرند.با این حال، گره هايFANET میتوانند از زمین دور باشند و در اغلب موارد، بین نیروهاي UAV قرار می گیرد.
4-1-5-سنجش نقشه FANET
ویژگی هاي متمایز FANET سنجش نقشه منحصر به فرد را اعمال میکند.دراین بخش، مهمترین سنجش نقشه FANET؛ سازگاري، مقیاس پذیري، تاخیر،ضرورت پهناي باند مورد بحث قرار گرفته است.
4-1-6-محلی کردنمحلی سازي جغرافیایی دقیق در هسته شبکه هاي خود مختار موبایل و همکاري است . روش هاي محلی سازي موجود عبارتند از:سیستم موقعیت یابی جهانی ، پایه (یا ستون ) و محلی سازي مبتنی بر نزدیکی.
درMANET ، سیستم موقعیت یابی جهانی معمولا براي دریافت مختصات استفاده می شوداز ترمینال ارتباطات تلفن همراه واغلب اوقات،سیستم موقعیت یابی جهانی براي تعیین محل گره ها کافی است.هنگامی که سیستم موقعیت یابی جهانی در دسترس نیست، مانند مناطق جنگلی متراکم، گره هاي مدرن و یا روش هاي مبتنی بر مجاورت نیز می تواند مورد استفاده قرار گیرد. در VANET، براي گیرنده ي GPS درجه ناوبري، حدود 15 – 10 متر دقت وجود دارد، که می تواند قابل قبول براي مسیر راهنمایی باشد . برخی از محققان از سیستم موقعیت یابی جهانی کمکی و یا سامانه موقعیت یاب جهانی تفاضلی استفاده می کنند با استفاده از برخی انواع مرجع بر اساس زمین ایستگاه براي اصلاح محدوده با دقت حدود 10 سانتی متراست. به دلیل سرعت بالا و مدل هاي مختلف تحرك از سیستم هاي که چندین سیستم اطلاعات جغرافیایی، FANET نیاز به اطلاعات محلی بسیار دقیق را با فواصل زمانی کمتري دارد. سیستم موقعیت یابی جهانی اطلاعات موقعیت را درفاصله زمانی یک ثانیه فراهم می کند، و این ممکن است براي برخی از پروتکل هاي ANET کافی باشد در این مورد، هر کدام ازپهپاد باید با یک سیستم موقعیت یابی جهانی و یک واحد اندازه گیري درونی (IMU) مجهز باشد تا موقعیت خود را به سایرمکان ها در هر زمان ارائه دهند. IMU را می توان از طریق سیگنال سیستم موقعیت یابی جهانی کالیبراسیون کرد و بنابراین می تواند موقعیت را با سرعت بیشتري ارائه دهد.
به دلیل تفاوت هاي فوق بین MANET،FANETوVANET؛ما ترجیح می دهیمFANET را به عنوان یک خانواده مجزا جداگانه بررسی کنیم.تفاوت بینVANET،MANETوFANET در جدول 1 مشخص شده است.
جدول 1: مقایسه MANET,VANET, FANET
|
FANET |
VANET |
MANET |
|
|
خیلی زیاد |
زیاد |
کم |
حرکت گره |
|
براي مسیر هاي از پیش طراحی شده منظم است اما براي سیستم هاي چند منظوره خود مختار از مدل متحرك خصوصی |
منظم |
تصادفی |
مدل متحرك |
|
خیلی کم |
زیاد |
کم |
چگالی گره |
|
با فاصله از زمین |
نزدیک به زمین |
نزدیک به زمین |
مدل پخش رادیویی |
|
GPS,AGPS,DGPS,IMU |
GPS,AGPS,DGPS |
GP |
محلی کردن |
4-1-7 – مقیاس پذيري
همکاري در پهباد ها می تواند عملکرد سیستم را در مقایسه با یک سیستم تک پهبادي بهبود بخشد. در واقع، این اصلی ترین انگیزه براي استفاده ازسیستم مبتنی بر چند پهباد است.دربسیاري از برنامه هاي کاربردي، افزایش عملکرد با تعداد پهپادها ارتباط نزدیکی دارد . به عنوان مثال، تعداد بیشتري ازپهبادها می توانند یک جستجو و عملیات نجات سریع تر تکمیل کند.پروتکل هايFANET و الگوریتم ها باید طراحی شوند به طوري که هر تعداد از پهباد ها بتوانند با قابلیت اجرایی کم با یکدیگر کار کنند.
4-1-8- ضرورت پهناي باند در بیشتر برنامه هايFANET، هدف جمع آوري داده ها ازمحیط زیست و انتقال داده هاي جمع آوري شده به پایه زمین است به عنوان مثال،در نظارت و یا عملیات نجات؛ تصویر یا ویدئو منطقه هدف باید از پهبادها به اتاق فرمان انتقال یابد. به یک مرکزکنترل با تاخیر بسیارکم وپهناي باند بالا نیاز است علاوه بر این، با کمک فن آوري هاي پیشرفته و سنسور،میتوان داده ها را با وضوح بسیار بالا جمع آوري کرد، و این باعث میشود که احتیاج به پهناي باند بیشتري باشد.همکاري و هماهنگی چندین جایگاه همچنین نیاز به منابع پهناي باند اضافی دارد.از سوي دیگر، استفاده از پهناي باند موجود محدودیت هاي زیادي دارد مانند:
ظرفیت کانال ارتباطی
سرعت UAVs ساختار خطاي خطوط ارتباط بی سیم
عدم امنیت با ارتباطات پخش
یک پروتکل FANET باید ظرفیت پهناي باند مورد نیازرا برآورده کند تا بتواند رزولوشن بسیار بالا تصویر یا ویدئو در زمان واقعی تحت محدودیت هاي مختلف را ارائه دهد.
5- پروتکل هاي ارتباطی براي FANETs
در این بخش،ما پروتکل هاي موجودFANET براي لایه فیزیکی،لایه انتقال داده (MAC)، لایه شبکه، لایه حمل و نقل و همکاري هاي متقابل لایه را ارائه می کنیم. 5-1- لایه فیزیکی لایه فیزیکی با انتقال سیگنال اصلی ارتباط دارد با فناوري هایی نظیر مدولاسیون یا کدگذاري سیگنالها . توالی هاي بیت داده هاي مختلف می توانند با یکدیگر متفاوت باشند شکل گیري با تغییر فرکانس، دامنه ومرحله سیگنال به طورکلی، درلایه فیزیکی، بیت هاي داده به شکل موج هاي سینوسی انتقال می یابند با استفاده ازیک آنتن هوا را به هوا منتقل کنید.
عملکرد سیستم MANET بسیار وابسته به آن است.لایه فیزیکی وتحرك بسیار بالا باعث میشودمسائل مشکل اضافی در FANET.
به منظور توسعه قوي و معماري ارتباطات داده پایدار برايFANET،شرایط لایه فیزیکی باید کاملا درك شود و به خوبی تعریف شده است.به تازگی هواپیماهاي بدون سرنشین به UAV و-UAVtoسناریوهاي ارتباطات زمینی به طورگسترده اي بوده است در هر دو محیط شبیه سازي وزمان واقعی مورد مطالعه قرار گرفت.مدلهاي پخش رادیو و ساختار آنتن به عنوان عوامل کلیدي که طراحی لایه فیزیکیFANET را تحت تاثیر قرار می دهد مورد بررسی قرار گرفته است .
5-1-1- مدل پخش رادیو امواج الکترومغناطیسی از فرستنده به گیرنده از طریق کانال هاي بی سیم پخش می شوند.مشخصه انتشار موج رادیویی به عنوان یک تابع ریاضی،به نام مدل سازي رادیویی منتشر می شود،بیان میکنیم. محیطFANET در مقایسه با سایر انواع شبکه هاي بی سیم، چندین چالش منحصر به فرد را در رابطه با انتشار رادیویی دارد. برخی از چالش ها به شرح زیر خلاصه می شوند: -تغییرات در فاصله ارتباطی. -جهت جفت هاي ارتباطی در الگوي تابش آنتن. -اثرات انعکاس زمین.
-سایه اي که از پلت فرم پهبادها (UAV)و تجهیزات الکترونیکی برقی به وجود آمده است. -نتیجه برخورد هواپیما (زمین، رول، چرخش و غیره) بر کیفیت لینک بی سیم-شرایط محیطی. – نفوذ و تداخل خصمانه به دلیل عوامل فوق،ارتباطات پیوندها در طول زمان درFANETها کیفیت متفاوتی دارند.
5-2-لایهMAC تحرك بالا یکی از مشخص ترین خواص شبکه FANET است وثمره وجود آن مشکلات جدید براي لایه MAC در شبکه ادهاك است. به دلیل تحرك بالا و فواصل مختلف بین گره ها، معمولا کیفیت پیوند در شبکهFANET نوسان می گیرد.تغییرکیفیت پیوند وقطع شدن پیوند تحت تاثیرطراحیMAC FANETقرار دارد. تاخیر بسته ها یکی دیگر از مسائل طراحیMAC FANET است. به ویژه براي کاربردهاي بلادرنگ که زمان تاخیر بسته ها باید محدود باشد و چالش هاي جدیدي تحمیل می شوند.خوشبختانه،فناوري هاي جدیدي وجود دارند که می توانند براي رو به رو شدن با الزامات شبکهFANETدر لایه MAC مورد استفاده قرارگیرند.آنتن هدایتی و مدارهاي انتشارکاملا دو طرفه با پذیرنده چند بسته اي نمونه هاي امیدوار کننده پیشرفت تکنولوژي هستند که میتوانند در لایه MAC در شبکه ادهاكFANET مورد استفاده قرار بگیرند . 5-2-1 لایهMAC در شبکه ادهاك بر اساس آنتن هدایتی آنتن هدایتی داراي مزایاي متعددي نسبت به آنتن پخش کننده براي شبکه FANET است که به عنوان یک زیربخش از لایه فیزیکی ارائه شده است.علاوه بر مزایاي استفاده از آنتن جهت دار، مشکلات طراحی منحصر به فردي را به ویژه براي لایهMAC به ارمغان می آورد. در حالی که بسیاري از لایه هايMAC مبتنی بر آنتن جهت دار براي شبکهVANET و شبکه MANET پیشنهاد شده اند. تحقیقات کمی در مورد طراحی لایه MACدر شبکه ادهاك فنت با آنتن هاي هدایتی وجود دارد.
5-2-2-لایهMAC در شبکه ادهاك با رادیوي کاملا دو طرفه وپذیرنده چند بسته اي
در ارتباطات مرسوم بی سیم پذیرش و ارسال نمی توانند همزمان انجام شوند.با پیشرفت هاي اخیر در مدارات رادیویی،اکنون امکان تحقق بخشیدن به ارتباط کاملا دو طرفه بر روي یک کانال وجود دارد.یکی دیگر از محدودیت هاي ارتباطات مرسوم بی سیم، در مورد دریافت بسته ها است.اگر بیش از یک فرستنده وجود داشته باشد گیرنده نمی تواند همه ي بسته ها را به درستی دریافت کند. خوشبختانه دریافت داده ها از بیش از یک منبع با کمک مدارات رادیویی با پذیرنده چند بسته اي (MPR) ممکن شده است.مدارات رادیویی با پذیرنده چند بسته اي وکاملا دو طرفه اثرات قابل توجهی را در لایهMACدر شبکه ادهاك FANE ایجاد کرده اند.
اطلاعات وضعیتی کانل(CSI) ،یکی از مهمترین پارامتر هاي ارسال از طریق امواج رادیویی کاملا دو طرفه است، و تعیین آن (CSI) براي محیط هاي بسیار پویايFANET تقریبا غیرممکن است.با بروزرسانی مکرر اطلاعات وضعیتی کانال پهباد ها می توانند اطلاعات آخرین وضعیت کانال ها را در هر زمان داشته باشند . ساختار مبتنی بر علامت به روزرسانی اطلاعات وضعیت کانال برخورد بسته ها را حذف میکند.نتایج عملکرد اثرات لایهMAC پیشنهادي را حتی اگر دانش کانال ها ناقص باشد نشان داده اند .
5-3- لایه شبکه مطالعات اولیه شبکهFANETوآزمایشهاي طراحی شده با پروتکل هاي مسیریابی شبکهMANET موجود است.یکی از اولین آزمایش هاي پرواز با معماري شبکه ANET در سازمان بین المللیSRIانجام شده است. توپولوژي پخشی مبتنی بر ارسال مسیر – معکوس(پروتکل TBRPF) ، که در واقع یک پروتکل فعال است به عنوان لایه شبکه براي به حداقل رساندن سربار مورد استفاده قرارگرفته است. به خاطر تحرك بالاي گره هاي شبکهFANET، ذخیره جدول مسیریابی در روش کنشی مطلوب نیست. با این حال پیدا کردن راه هاي تکراري قبل از تحویل هر بسته در مسیریابی واکنشی، می تواند جامع باشد . یک استراتژي، تنها بر اساس اطلاعات موقعیتی از هرگره می تواند الزامات شبکهFANET را تامین کند. اگرچه در پیاده سازي هاي اولیه شبکهFANET ازاستراتژيهاي مسیریابی شبکهMANET استفاده شد،بیشترالگوریتم هاي مسیریابی شبکهMANET براي شبکه FANET به دلیل مسائل خاص پهباد ها از قبیل تغییرات سریع درکیفیت پیوندها و تحرك بسیار بالاي گره ها، ایده آل نیستند.بنابراین راه حل هاي مسیریابی خاص شبکه FANET درسال هاي اخیر توسعه یافته اند.
یکی دیگر از مجموعه راه حل مسیریابی براي شبکه FANET پروتکل سلسله مراتبی است که براي رسیدگی به مشکل مقیاس پذیري شبکه توسعه پیدا کرده است.در اینجا شبکه شامل تعدادي گروه است که در مناطق مختلف عملاتی واقع شده اند.هر گروه، یک سرگروه دارد، و همه ي گره هاي موجود در محدوده انتقال مستقیما از یک سرگروه در یک گروه قرار دارند. سرگروه با لایه بالاتر پهباد ها یا ماهواره به طورمستقیم در ارتباط است و یا به صورت غیرمستقیم به عنوان نماینده کل گروه است.از سوي دیگر سرگروه می تواند داده ها را به وسیله پخش در بین اعضاي گروه منتشرکند .
این مدل می تواند در زمانی که منطقه عملیاتی بزرگ و تعداد پهبادها زیاد است نتایج مطلوبی تولیدکند. پیش بینی ساختار متحرك پهباد ها با کمک الگوریتم پیش بینی ساختار درخت و زمان انقضاي پیوند ها در مدل متحرك انجام می شود. به وسیله ي این مدل مجموعه اي از وزن ها به پهباد ها داده می شود و پهبادي که در میان همسایه ها وزن بالاتري دارد به عنوان سرگروه انتخاب می شود.بررسی هاي شبیه سازي شده نشان می دهد که طرح انتخاب سرگروه می تواند پایداري گروه ها و سرگروه ها را افزایش دهد.
پهباد ها به طور منظم براي ماموریت هاي از الگوریتمهاي مسیریابی داده محورFANET استفاده می کنند.
خاص تولید می شوند و این براي انطباق سیستم هاي چند پهباده در ماموریت هاي مختلف دشوار است.
راه حل هاي مسیریابی داده محورمیتوانند براي انواع مختلفی از کاربرد هاي سیستم هاي چند پهباده استفاده شود.
انتشار معمولا براي نوعی از معماري ارتباطی استفاده می شود.این به طورخودکار داده هاي – مدل اشتراك متصل به هم اي تولید میکند که ناشر نامیده می شود و مصرف کننده ي داده که مشترك نامیده می شود. راه حل هاي داده محور به تجمع و تراکم داده ها در شبکه اجرایی نیاز دارند.این تنها داده هاي ثبت شده ي نوع / محتوا را براي مشترك شدن پخش می کند. در این مورد، انتقال داده ها از یه نقطه به چند نقطه می تواند به انتقال داده از یک نقطه به یک نقطه ترجیح داده شود.
5-4- لایه حمل و نقل
موفقیت طرح هايFANET با قابلیت اطمینان معماري ارتباطی مرتبط است وایجاد یک مکانیزم حمل و نقل قابل اعتماد به ویژه دریک محیط پویا بسیار ضروري است،.مسئولیت اصلی پروتکل حمل و نقل FANET به شرح زیر است: قابلیت اطمینان: قابلیت اطمینان همیشه مسئولیت اصلی پروتکل هاي حمل و نقل در شبکه هاي ارتباطی بوده است.پیام ها باید با اطمینان به مقصد گره منتقل شوند تا قابلیت هاي مناسب را تامین نمایند.داده ها ممکن است متن ساده یا باینري باشند که در آن 100٪ قابلیت اطمینان مورد نیاز است یا ممکن است جریان هاي چند رسانه اي باشد که قابل اطمینان بودن کم باشد.پروتکل انتقالFANETبایدسطح اطمینان مختلفی را براي برنامه هاي مختلفFANET پشتیبانی کند.کنترل ازدحام:عواقب معمول در ازدحام شبکه، کاهش میزان ارسال بسته و افزایش تاخیر است.اگر یک FANET پر شود،نمیتوان از برخورد بین UAV ها اجتناب کرد.مکانیزم کنترل ازدحام براي طراحی FANET با قابلیت اطمینان و بهبود عملکرد لازم است کنترل جریان: به دلیل فرستنده سریع یا چند فرستنده گیرنده ممکن است بیش از حد باشد .کنترل جریان می تواند یک مشکل جدي به ویژه براي سیستم هاي پهبادي چندتایی ناهمگن باشد. اولین سیستم FANET بر اساس سیستم پروتکل هاي حمل و نقل موجود اجرا شد. .این کار بر اساس آدرس IP ولایه حمل و نقل از سیستم پشتیبانی از هر دو TCP وطرح هاي حمل و نقل UDPانجام شد . با این حال،TCP انجام می شوددر محیط هاي MANET ضعیف است و همچنین مناسب نیست . FANETs قابلیت کنترل جریان TCP مبتنی بر است در مکانیزم فریم و تغییر اندازه پنجره آنچه به طور مداوم برآورد دقیق زمان سفر دور یک مسئله چالش برانگیز است.
ارتباطات داده محور به سه نوع تقسیم می شود : فضاي تجزیه شده: قسمت ها در هر نقطه اي می توانند ارتباط برقرار کنند. زمان تجزیه شده: داده ها را می توان به صورت بلافاصله یا بعدا به مشترکین ارسال کردجریان تجزیه شده: تحویل می تواند با اطمینان بالایی انجام شود. این مدل می تواند براي سیستم هایی که شامل تعداد کمی پهباد با مسیر از پیش تعیین شده است که به همکاري کمتري نیاز دارند اجرا شود.مسیریابی یکی از مسائل چالش برانگیز شبکه FANET است. به علت چالش هاي منحصر به فرد شبکهFANET،راه حل هاي مسیریابی شبکهMANET موجود نمی توانند نیازمندي هاي شبکهFANET را برآورده کنند. ارتباطات نظیربه نظیر براي هماهنگی وجلوگیري از برخورد سیستم هاي چند پهباده ضروري است.با این حال،ممکن است از شبکه FANET براي جمع آوري اطلاعات محیطی از طریق شبکه هاي حسگر بی سیم، که الگو هاي مختلف ترافیکی را تولید می کنند استفاده شود.تمامی داده ها در اختیار مجموعه ي محدودي ازپهباد ها که به صورت مستقیم با زیرساخت ارتباطی ارتباط برقرار می کنند قرار می گیرد.
مسیریابی داده محور یک روش امید بخش براي شبکهFANET است.با کمک معماري اشتراك – انتشار الگوریتم هاي داده محور، تولید سیستم هاي چند پهباده اي که از کاربرد هاي مختلف پشتیبانی می کنندمی تواند ممکن شود.
6-نتیجه گیري ارتباطات یکی از مسائل مربوط به طراحی چالش برانگیز براي سیستم هاي چند پهبادي است.در این تحقیق،شبکه هاي مرسوم بین پهپادها به عنوان یک خانواده شبکه جداگانه، شبکه حمل و نقل هوایی (FANET)مورد بررسی قرار گرفت.FANET را تعریف کردیم وچندین سناریوکاربرد FANET را ارائه شد. پروتکل های مسیر یابی و همچنین در مورد تفاوت بین FANET و دیگر انواع شبکه هاي اختصاصی از لحاظ تحرك، چگالی گره، مدل پخش رادیویی و محلی سازي بحث کردیم.ملاحظات طراحیFANET نیز به عنوان سازگاري، مقیاس پذیري، وپهناي باند مورد بررسی قرار گرفته شد.
آدرس کانال تلگرام سایت بیگ دیتا:
آدرس کانال سروش ما:
https://sapp.ir/bigdata_channel
جهت دیدن سرفصل های دوره های آموزشی بر روی اینجا کلیک کنید.
جهت ثبت نام در دوره های آموزشی بر روی اینجا کلیک کنید.
Views: 1030
برچسبارتباط بین ریزپرنده ها پهبادهای کوچک ریزپرنده